A Mind-Controlled Exoskeleton
September 13, 2017
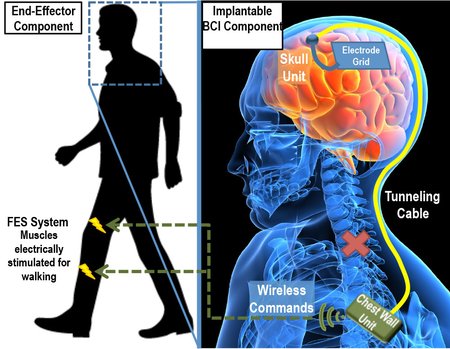 A schematic of how a brain-machine interface might interact with prosthetic legs.
Credit: Courtesy of Payam Heydari
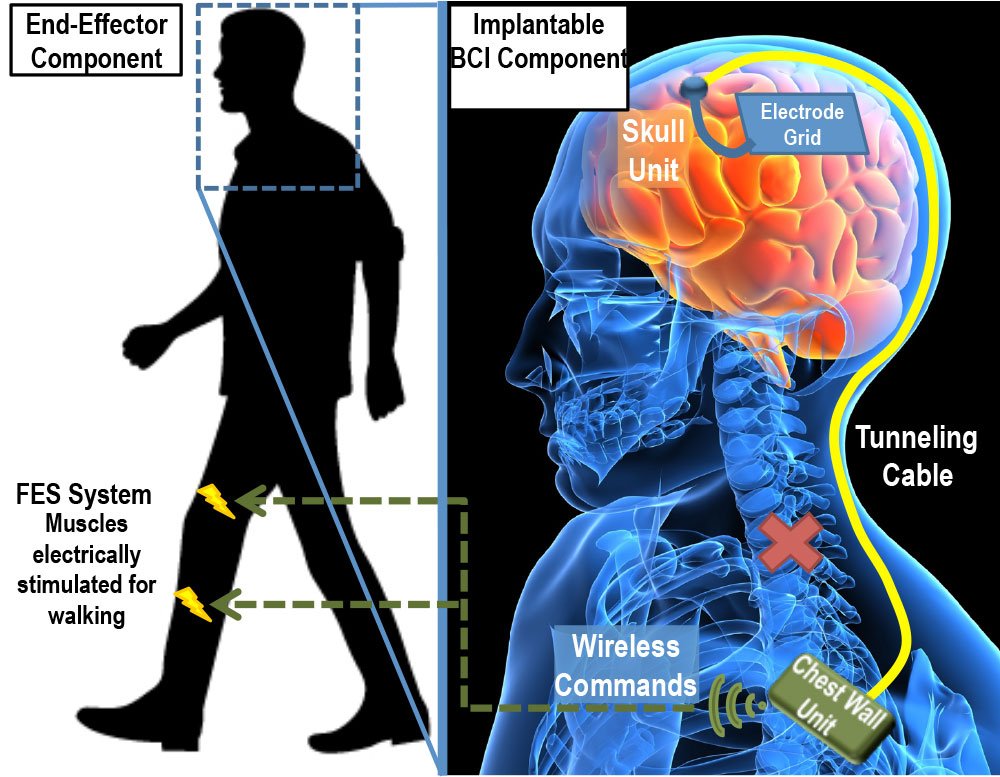
A schematic of how a brain-machine interface might interact with prosthetic legs.
Credit: Courtesy of Payam Heydari
{kind=link}